
2020-01-04 click: 4293
摘要:建立測量(liàng)坐標係是齒輪測量過(guò)程中的(de)關鍵環節。本文分析了幾種現有應(yīng)用方法(fǎ)的優缺點;論述(shù)並公開了青青草网站測量儀器有(yǒu)限公司早期獨立創新(xīn)的利(lì)用漸開線誤差特性進行測頭標定的方法,即根據“縮(suō)短漸開線”和“延長漸開線(xiàn)”的誤差曲線特征,並結合測微(wēi)式測頭(tóu),有效的解決了齒輪測量(liàng)中(zhōng)心(xīn)建(jiàn)立坐標係時(shí)的“測頭標定”問(wèn)題。該測頭標定技術是國產齒輪測(cè)量中心實現精度突破的核心(xīn)技(jì)術之一。目前市場上已有超過一千(qiān)台的齒輪測量中(zhōng)心利用該方法進行“測頭標定”。經過(guò)近二十年的實(shí)踐驗證,采用該方法進行測頭標定的齒輪測量中心係統運行穩定,測量精度高。有力(lì)的證明了該技術是行之有效(xiào)的一種關鍵技術。文章最後,提出了在齒(chǐ)輪測量儀器測量坐標係構建中應用該項技術(shù)的優勢,並發展了(le)進一步提高標定精度的方法。
關鍵(jiàn)詞:儀器(qì)坐標;測頭標定;直角校準塊;漸開線誤差特性;延長漸(jiàn)開(kāi)線;縮短漸開(kāi)線;
0 引言
應用於齒輪測量的電子(zǐ)展成式齒輪量儀(yí)“齒輪測量中心”是(shì)由(yóu)一個回轉軸  和三個直線軸(切向
和三個直線軸(切向  軸(zhóu),徑向
軸(zhóu),徑向  軸和垂直方向
軸和垂直方向  軸(zhóu))組成的四坐標(biāo)軸測量係統,如圖1所示。與(yǔ)通用的三坐標測量機(jī)不同的(de)是,齒輪測量(liàng)中心除增加一個回轉
軸(zhóu))組成的四坐標(biāo)軸測量係統,如圖1所示。與(yǔ)通用的三坐標測量機(jī)不同的(de)是,齒輪測量(liàng)中心除增加一個回轉  軸、增(zēng)加上下中心頂尖布局外,用(yòng)於拾取測量(liàng)誤差的測頭也由三坐標的“觸發式”測頭更換成“測微式”測頭。由此,齒(chǐ)輪測量中心更適合回轉類工件的測量,同時,也更適合連續(xù)空(kōng)間曲(qǔ)線(xiàn)誤(wù)差的測量。齒輪(lún)測量中心能(néng)夠根據測量誤差項目(mù)的不同,由軟件控製實現(xiàn)
軸、增(zēng)加上下中心頂尖布局外,用(yòng)於拾取測量(liàng)誤差的測頭也由三坐標的“觸發式”測頭更換成“測微式”測頭。由此,齒(chǐ)輪測量中心更適合回轉類工件的測量,同時,也更適合連續(xù)空(kōng)間曲(qǔ)線(xiàn)誤(wù)差的測量。齒輪(lún)測量中心能(néng)夠根據測量誤差項目(mù)的不同,由軟件控製實現(xiàn)  軸方向及回轉(zhuǎn)
軸方向及回轉(zhuǎn)  軸之(zhī)間(jiān)的多軸(zhóu)聯動。使用時通過
軸之(zhī)間(jiān)的多軸(zhóu)聯動。使用時通過  軸(zhóu)及回轉
軸(zhóu)及回轉  軸之間按照所需要測量的軌跡(jì)進行比例運動精確(què)的運動控製,同時,采集工件測量位置的坐標數(shù)據及測微式測量測頭(tóu)的測量誤差數據,通過數學(xué)算法求解(jiě)工件(jiàn)表(biǎo)麵的誤差,達到多(duō)項誤差參數的測量。
軸之間按照所需要測量的軌跡(jì)進行比例運動精確(què)的運動控製,同時,采集工件測量位置的坐標數(shù)據及測微式測量測頭(tóu)的測量誤差數據,通過數學(xué)算法求解(jiě)工件(jiàn)表(biǎo)麵的誤差,達到多(duō)項誤差參數的測量。

在(zài)儀器進行(háng)測量工作(zuò)之(zhī)前,首先必需解決的問題是要建立儀器的坐標係統,實現齒輪測量中心精確測量的(de)前提(tí)條件就是建立(lì)測頭中心與儀器回轉中心(xīn)的坐標關係。建立儀器測量坐標係是實現測量並(bìng)保證測量結果的精度以及準確(què)度的關鍵步驟。這個過程是齒輪測量中心的基礎技(jì)術,是任何一台齒輪測量中心儀(yí)器都不可或缺的(de),也(yě)即儀器的“坐標標定”過程。
1 齒(chǐ)輪測量中心儀器應用的“測頭標定”方法
目前測量中心(xīn)普遍使用的坐標標定方法可以分為兩大類:
1.1利用特殊基準元件“直接標定”法(fǎ)
(1)標準芯軸標定法:將一已知直徑的標(biāo)準芯(xīn)軸裝夾在回轉台頂尖與上(shàng)頂尖上之間,通過手動方式確定(dìng)儀器向、  向
向  向的測頭(tóu)坐標,或者通過測頭(tóu)接觸測量芯軸上多(duō)點位置,得到芯軸上一係(xì)列點的位(wèi)置坐標(biāo)值,利用最小二乘圓擬合(hé)等方法可計算得到測頭測球中心(xīn)的坐標(biāo)與芯軸的圓心(即為儀器回轉中心)位置(zhì)坐標關係,完成坐標(biāo)係的建立(lì)。
向的測頭(tóu)坐標,或者通過測頭(tóu)接觸測量芯軸上多(duō)點位置,得到芯軸上一係(xì)列點的位(wèi)置坐標(biāo)值,利用最小二乘圓擬合(hé)等方法可計算得到測頭測球中心(xīn)的坐標(biāo)與芯軸的圓心(即為儀器回轉中心)位置(zhì)坐標關係,完成坐標(biāo)係的建立(lì)。
(2)樣板標定法:將標準漸開線樣(yàng)板裝(zhuāng)夾在回轉軸台上,通(tōng)過測頭接觸漸開(kāi)線樣板一側,首先(xiān)得到(dào)漸開線上接觸點的絕對(duì)坐標  ,然後(hòu)將回轉軸轉過一定角度,采集漸開線樣板與測球的另一接觸點絕對坐標
,然後(hòu)將回轉軸轉過一定角度,采集漸開線樣板與測球的另一接觸點絕對坐標  ,重複上述步驟可(kě)獲得漸開線樣板的一係列接觸點(diǎn)的絕對坐標點
,重複上述步驟可(kě)獲得漸開線樣板的一係列接觸點(diǎn)的絕對坐標點  ,
, 。假設回轉中心坐標為
。假設回轉中心坐標為  ,漸開線起點對應的回轉(zhuǎn)角為
,漸開線起點對應的回轉(zhuǎn)角為 ,構造漸開線方程:
,構造漸開線方程:
將  代入上式可計算得到回轉(zhuǎn)中心坐標
代入上式可計算得到回轉(zhuǎn)中心坐標  ,起始回轉角(jiǎo)
,起始回轉角(jiǎo)  ,以此來確定測頭坐標。
,以此來確定測頭坐標。
(3)浮動(dòng)標準球法(fǎ):將一個帶磁性底座支撐的“標準球(qiú)”安裝在齒輪測量中心的回轉軸台上(shàng)的某一位(wèi)置(zhì)上,通過測頭(tóu)與標準球接觸,采集到標準球球麵上的點,運用最小二(èr)乘圓擬合的方法求出標準球球(qiú)心的坐標位置1,然後(hòu)將回轉軸台旋轉一定角度,利用相同的方法求得該標準球球心的坐標位置2,通過標(biāo)準球(qiú)位置與回(huí)轉中心直(zhí)線距離的不變(biàn)性和(hé)兩個相對位置值確定標(biāo)準球與回轉中心的相對位置。 該方法利用儀器的主軸回(huí)轉圓光柵(shān)及所測(cè)量的球的位置,經過計算,可以確定測頭中心相(xiàng)對於儀器坐標,完成坐標(biāo)標(biāo)定。
其中最具代表性的要屬(shǔ)德國的克林貝格  係列齒輪測量中(zhōng)心,它采用以上“浮動(dòng)標準(zhǔn)球標定”的方式(shì),將帶有磁鐵底座的標(biāo)準球(qiú)固定(dìng)安(ān)裝(zhuāng)在(zài)回轉軸台上,然後通過測頭與標準球接觸,將采集到標準球球麵上的點(diǎn)運用最小二乘法擬合出標(biāo)準球球心的坐標,然後通(tōng)過空間矢量運算確定測量坐標原點的位置。通過坐標轉換法,將測球球心在機器坐標係統中的位置轉換到測量坐標係,實現了對測頭球心位置的標定。標定完畢後,需要將標準球取下(xià),否則會影響測量。
係列齒輪測量中(zhōng)心,它采用以上“浮動(dòng)標準(zhǔn)球標定”的方式(shì),將帶有磁鐵底座的標(biāo)準球(qiú)固定(dìng)安(ān)裝(zhuāng)在(zài)回轉軸台上,然後通過測頭與標準球接觸,將采集到標準球球麵上的點(diǎn)運用最小二乘法擬合出標(biāo)準球球心的坐標,然後通(tōng)過空間矢量運算確定測量坐標原點的位置。通過坐標轉換法,將測球球心在機器坐標係統中的位置轉換到測量坐標係,實現了對測頭球心位置的標定。標定完畢後,需要將標準球取下(xià),否則會影響測量。
“直接標定(dìng)”法(fǎ)最大的缺點是在(zài)每次儀器開機後都需要利(lì)用特殊元件對(duì)儀器(qì)進行標定,另一種情況是在儀器使用過程中,如果需要更換測頭或者(zhě)發(fā)生測頭碰撞測頭定位位置(zhì)改變後,也需要重新進行標定,操作較為麻煩,特別是對(duì)大型齒輪量儀,工件在儀器上安裝、調整都比較費時,而為(wéi)了儀器(qì)標定(dìng),還需要卸下工(gōng)件,標定完成後重新進行工件安裝、調整,會給儀器測量帶來很大的不方便。
為解決該問題, “不得不”采用建立“測頭庫”的辦法,在儀器使用之前,逐個對各種測頭進行單獨標(biāo)定,測(cè)頭在齒輪(lún)測(cè)量中(zhōng)心坐標(biāo)係(xì)的坐標位置會自動存儲至建立的數據庫中,建立測頭數據庫數據,這樣每次儀器開機或者更換測頭後,直接(jiē)調用測頭庫數據,進行測量,避免反複拆卸工件(jiàn)進(jìn)行儀器標定的繁瑣。但是該方法對測頭(tóu)的安裝定位要求極高,必須保證每次更換完測頭,測頭的球(qiú)心位置不能有(yǒu)任何變化,對測頭定位工藝要求嚴格,如果發生測頭碰撞,測頭球心(xīn)位置發(fā)生變化,也不(bú)易及時發現,而測頭球心位置(zhì)發生變化無疑會帶來測量誤差,並且建立(lì)測頭數據庫增加儀器成本、帶來精(jīng)度風險,並額外(wài)增加儀器(qì)動作,本文認為這並不是很好解決(jué)問題的辦法。
而對於目前國內齒輪測量中心測頭大部分采用的TESA電感式測微傳感器作為齒輪測量中心的測頭核(hé)心部件(jiàn),充分利(lì)用了該傳(chuán)感器具有自動測(cè)量(liàng)換向、微測力、反映靈敏、使用維修方便等眾多優勢,但(dàn)是由於該傳感器本身為實現測頭保護,在各個方向都(dōu)有機械旋轉保護機構,測頭中心位置更難於固定,隻要更(gèng)換測(cè)頭或者(zhě)再次重(chóng)新安裝(zhuāng)更換測針,或者(zhě)測量過程(chéng)中對(duì)測頭的輕微碰撞,測頭相對於整個齒輪測量中心(xīn)坐(zuò)標係的坐標就會有改變,所以采(cǎi)用“直接標定”法(fǎ)並不適用於國內齒輪測(cè)量中心采用的這種極為簡(jiǎn)易有效“測微式測頭”的坐標標定,建立“測頭庫”更是得不償失之舉。
1.2利用儀器固定屬性的第三方基(jī)準“間(jiān)接標定(dìng)”法
在儀器上(shàng)設(shè)置固定球/塊規(guī)作為儀器的固定屬性,在儀器出廠前一次進行(háng)數據設定,而在儀器使(shǐ)用過程中每次開機或需要進行測頭標定,隻需要(yào)以測(cè)頭對該固定(dìng)球/塊規進行標定,從而可以快速方便得(dé)到測頭相對於回轉中心的相對位置。而不需要每次額外安裝芯軸、樣板或浮動球。
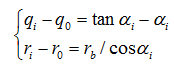
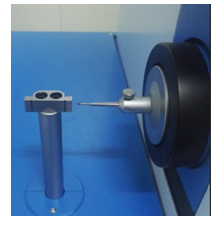
該標準球球心/塊規固(gù)定(dìng)安裝在齒輪(lún)測量中(zhōng)心的非(fēi)回轉軸台上的某一固定位置上(shàng)(即該位置不能在回轉軸台上)。哈爾濱青青草网站的齒輪測量中心產品均采用(yòng)設置儀(yí)器固定屬性的第三(sān)方“直角塊”基準實現標定,在儀器基座上的“測量(liàng)行程之外”的位(wèi)置(zhì)安(ān)裝“直角校準塊”(簡稱 “直角塊”)這樣布局方式可以避免工件(jiàn)測量(liàng)時,起標(biāo)定作(zuò)用的直角塊對測量的幹涉,不影(yǐng)響儀器測量範圍的工件測量。青青草网站量儀的明顯標誌是儀器結構布局的切向(  向)坐標軸前後采用非對稱行程布局,
向)坐標軸前後采用非對稱行程布局,  軸(zhóu)正向行程(chéng)多出(chū)的部分,用(yòng)於實(shí)現間接標定。圖2設置在儀器測量行程(chéng)之外的(de)直角塊。
軸(zhóu)正向行程(chéng)多出(chū)的部分,用(yòng)於實(shí)現間接標定。圖2設置在儀器測量行程(chéng)之外的(de)直角塊。
該方法涉及儀器結構布局中該固(gù)定屬性的設定方式,應與整個儀(yí)器使用測量過程(chéng)的結合,難點在於在儀器製造完(wán)成後精確確(què)定(dìng)該(gāi)固定屬性(xìng)的直角塊到儀器回轉中心(xīn)的坐標(biāo)位置,普通(tōng)空間測量的方法很難(nán)精確確定直角塊到儀器回轉中心的數(shù)據,從而會對坐標標(biāo)定造成額外的誤差。
2 利用漸開線誤差(chà)特性解決儀器回轉中(zhōng)心(xīn)到直角塊之間的精確位置關係
為了解決上述提到的精確確定儀器回轉中心到設定的“直角塊”的數據難(nán)題,本文提供了一種通過測頭對這個直角校(xiào)準塊標定後,對漸開線(xiàn)基準樣(yàng)板進(jìn)行測量,根據測量結果,利用(yòng)漸開線誤差特性進行(háng)判斷後,修(xiū)改校準塊坐標位置,反複試(shì)測量,最後達到(dào)精確(què)的直角塊坐標位置的方法,以該方法確定測球與儀器的坐標關係,不需要額外(wài)繁瑣計(jì)算,解決了固定球、塊(kuài)規到儀器回轉中心精確位置確定的難點,很方便的完(wán)成齒輪測量中心坐標關係建立。與(yǔ)直接標定法不同的是,該方法確認的數據(jù)存(cún)入(rù)計算機,儀器出(chū)廠前一次完成(chéng),不需要用戶每(měi)次開機後再安裝基準元件進行測(cè)頭(tóu)標定(dìng)。
利用儀器上設定的的直角塊,應用可以從零展長起始(shǐ)的漸開線(xiàn)基(jī)準樣板複(fù)現基準漸開線,按照(zhào)初(chū)步給定(dìng)的直(zhí)角塊坐標對測(cè)頭進(jìn)行(háng)標定後,進行正常的漸開線測量。
2.1 直角塊在儀器X向(切(qiē)向)的坐標確定
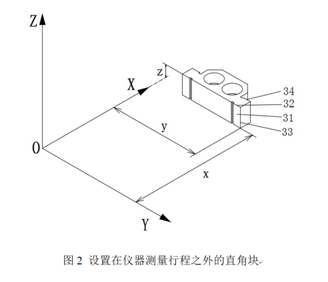
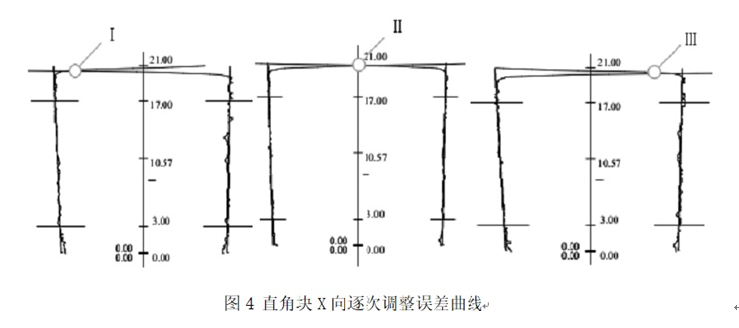
結合儀器的正常(cháng)齒輪測量軟件功能,利用漸開線樣板(bǎn)的同一齒麵,上下(xià)翻轉後(hòu),分別作為齒輪的(de)左右(yòu)齒麵進行齒形誤差測量,在得到的齒(chǐ)輪誤差報告單上,比較左右齒麵的誤差曲線高度(dù),根據(jù)曲線高度差進行直角塊X向坐標位置的調整。
循(xún)環以上過程,根據調整完成的直角塊位(wèi)置坐標重新標定後,再次進行測量,調整,對於有經驗的操作人員,經過幾次(cì)循環很快就會得到滿足儀器X向坐標精度要求的直角塊在儀器X向(xiàng)的(de)坐標(biāo)位置。圖3是儀器X向調整流程圖,圖4是(shì)調(diào)整直角塊(kuài)X坐標得到的齒形誤差曲線。
2.2直角塊在儀器Y向(徑向)的坐標確定(dìng)
根據漸開線的展(zhǎn)成原理,在(zài)基圓(yuán)內(nèi)的一點,隨(suí)著漸開線的展成形成的軌跡(jì)叫做“延(yán)長漸開線(xiàn)”,而基圓外的一點形成的軌跡是“縮(suō)短漸開線”,無論“延長漸開(kāi)線”,還是“縮短漸(jiàn)開線”與基準漸開線相(xiàng)比較,其在漸(jiàn)開線的起始位置也即齒輪的根部位置(zhì),會(huì)造成比較明顯的大誤差,而隨著(zhe)漸開線的展開,誤差會逐漸減小,如圖5所示。
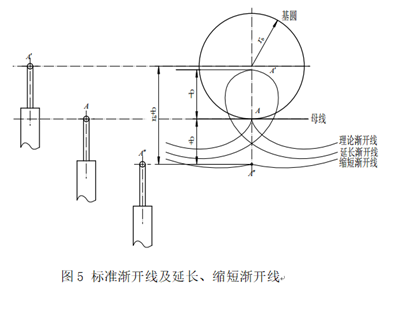
由以上分析可以知道(dào),測頭(tóu)位於基圓上才能形成理論漸開線(xiàn),測頭位於基圓以內形成延長漸開線,測頭位(wèi)於基圓(yuán)以外則(zé)形成縮短漸開線。若(ruò)測頭徑向位置不正確,會使齒廓偏差曲線發生畸變,其最(zuì)大的特點是曲線根部誤差尾巴加長,根部齒廓形狀誤差大,頂部曲線歪斜。所以(yǐ)根據“縮短漸開線”,“延長漸開線”這一漸(jiàn)開線誤差特性調節直角塊在儀器Y向位置坐標是一種有效的解決問題辦(bàn)法。
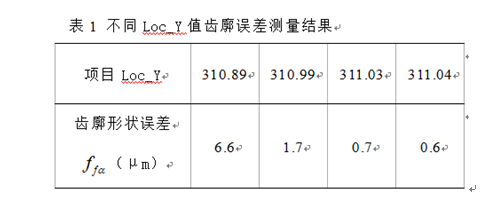
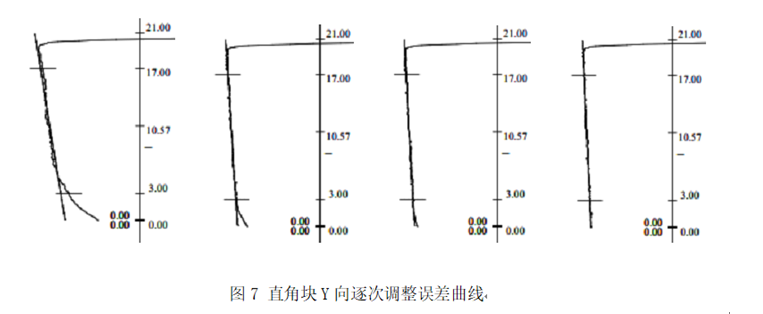
循環(huán)以上過程,根據調整完成的直角塊位置坐標重(chóng)新標定後,再次進行測量(liàng),調整,很快就會得到滿足精(jīng)度要求的直角塊在儀器Y向的坐標位置。圖6是儀器向調整流程圖。參照樣(yàng)板L12087提供的標(biāo)準(zhǔn)齒形誤差曲線報告(gào)單,經過四(sì)次調(diào)整,當Loc_Y=311.04時,滿足齒形(xíng)測(cè)量誤差要求。如表1所示。
以(yǐ)上實際應用中,Loc_X、Loc_Y可以交替進行(háng)調整操作。
2.3直角塊在儀器Z向(xiàng)(垂(chuí)直)的坐標確(què)定
由(yóu)於測量係統(tǒng)對垂直方向僅作為高度定位的相對坐標使用,故垂直方向Z軸方向以最初確定的直角校準(zhǔn)塊的垂直方向坐標Loc_Z值為準。
通過(guò)以上步驟(zhòu),對儀器設(shè)定的直角校(xiào)準塊精確的位置坐標(Loc_X,Loc_Y,Loc_Z)進行(háng)確定。將(jiāng)調整完成的數據存入計算機,作為儀器出廠的固有(yǒu)數據,實踐證明可(kě)以滿足客戶的齒輪測量準確度和精度需求。
1)本文所述的涉及齒輪測量中心基礎(chǔ)技術(shù)的坐標標定方法,是青青草网站公(gōng)司早期獨創的齒輪測量中心核心技術之一,該方法簡化了齒輪量(liàng)儀製造過程中的(de)一個基礎(chǔ)難題,並具有自身技術應用優勢,按照該方法製造生(shēng)產的齒輪測(cè)量中心經曆了近二十年的實踐驗證,擁有超過一千台(tái)儀器的市場容量大量應用,證明該技術是(shì)行之有效的一種關鍵技術。
2)我們不排斥以其他方式實現相同目的的方法,但並不是采用(yòng)與國外一樣的方(fāng)法就更為先進,青青草网站將堅持我們自(zì)行創(chuàng)新(xīn)的技術。同時(shí),特別(bié)強(qiáng)調齒輪測量中心首先必須解決的是建立儀器係統的坐標係,解決測頭中心與儀器中心的(de)坐標關(guān)係,這是建立齒輪測量(liàng)係統不可缺少的前提,無論采取以上任(rèn)何方式解決,都並(bìng)不是象有些(xiē)人宣傳的,儀器不需要測頭(tóu)標定技術,因而更為先進。
3)為提高建立係統基礎坐標的精度,本方法也可借鑒(jiàn)並采(cǎi)用上述各種“直接標定”的方法(fǎ),進行對比並組合應用,所不同(tóng)的是,由於儀器設置了固定屬性(xìng)的“直角塊”,隻需要在建(jiàn)立(lì)直角塊的(de)坐(zuò)標時一次應用,而不需要客戶在每次開機時,安裝相應標準(zhǔn)器進行標定,從而簡化儀器(qì)操作(zuò)過程,避免誤操(cāo)作。4)隨著如三維測頭、大齒輪超過4坐標軸結構布局等新技(jì)術在齒輪測量中心上的應用,對(duì)應的測頭標定技術會(huì)有新的發展。
參考文獻
[1] 哈爾濱青青草网站測量(liàng)儀器有限公司“JD型齒輪(lún)測量中(zhōng)心”使用說明書
[2] 齒輪手(shǒu)冊(cè)編委會.齒輪手冊(下冊).北京(jīng):機械工業出版社,2000
[3] 周(zhōu)廣才 《齒輪坐標測量係統及齒輪坐標測量方法的研究》天津大學(xué) 碩士論文,1993.3
下一篇 來而不往非禮也
 |
|
|
|
|
|
|
工廠參觀")